Аннотация: При управлении приводом бесщеточного двигателя элемент Холла используется для определения положения ротора, а его индукционный сигнал используется для передачи положения или система контроля напряжения отклонения скорости, то есть с помощью мультипликативной функции элементов Холла создается крутящий момент бесщеточного двигателя, пропорциональный отклонению. Если интегрированные датчики Холла правильно использовать в практических приложениях, систему управления можно значительно упростить, а ее работу сделать более стабильной.
Ключевые слова: датчик Холла; бесщеточный двигатель; управление приводом.
1 Принцип элемента Холла, используемого в качестве магнитного чувствительного элемента бесщеточного двигателя.
1.1 Принцип работы элемента Холла.
Элемент Холла изготовлен из полупроводникового материала, основанного на принципе эффекта Холла. Другими словами, когда электрический потенциал проводника находится в магнитном поле и направление его тока соответствует направлению магнитного поля, между двумя параллельными поверхностями проводника с током будет генерироваться напряжение, называемое потенциалом Холла. к току и магнитному полю, как показано на рисунке. Покажите 1, что величина магнитного поля равна интенсивности возбуждения.
UH=KHBlcosθ
Ключевые слова: датчик Холла; бесщеточный двигатель; управление приводом.
1 Принцип элемента Холла, используемого в качестве магнитного чувствительного элемента бесщеточного двигателя.
1.1 Принцип работы элемента Холла.
Элемент Холла изготовлен из полупроводникового материала, основанного на принципе эффекта Холла. Другими словами, когда электрический потенциал проводника находится в магнитном поле и направление его тока соответствует направлению магнитного поля, между двумя параллельными поверхностями проводника с током будет генерироваться напряжение, называемое потенциалом Холла. к току и магнитному полю, как показано на рисунке. Покажите 1, что величина магнитного поля равна интенсивности возбуждения.
UH=KHBlcosθ
Рисунок 2
Базовая
формула схемы измерения элемента Холла: коэффициент чувствительности единицы KH;
B — интенсивность магнитной индукции
I, возбуждающей ток через элемент Холла,
из приведенного выше уравнения видно, что при температуре окружающей среды и ток возбуждения остается неизменным, потенциал Холла пропорционален напряженности магнитного поля. Следовательно, силу магнитного поля можно определить, определив выходное напряжение элемента Холла.
1.2 Элементы Холла используются для определения положения магнитного полюса бесщеточных двигателей.
В бесщеточных двигателях обычно используется сталь с постоянными магнитами, переменный или пульсирующий ток через обмотку статора. Этот метод позволяет отказаться от щеток и коммутаторов для создания вращающихся магнитных полей. Вращающееся магнитное поле угла крутящего момента между магнитным полюсом и стальным вращающимся полюсом постоянного магнита должно поддерживаться на уровне половины диапазона, чтобы можно было создать хороший крутящий момент.
Следовательно, элемент Холла можно использовать в качестве магнитного датчика для определения положения ротора, а сигнал использовать для возбуждения обмотки статора. На рисунке 1 показана схема определения положения магнитного полюса элемента Холла бесщеточного двигателя. Выходное напряжение элемента Холла H изменяется с изменением магнитного поля при вращении двигателя. Транзисторы Т и Т2 попеременно включаются и выключаются, выдавая на клеммы А и В два противоположных сигнала. Сопротивление электрода можно регулировать в зависимости от выходного напряжения, а элемент Холла H может быть 5F-MS-07f.
2 Схема привода бесщеточного двигателя с использованием элемента Холла
2.1 Усиление и управление индукционным сигналом элемента Холла
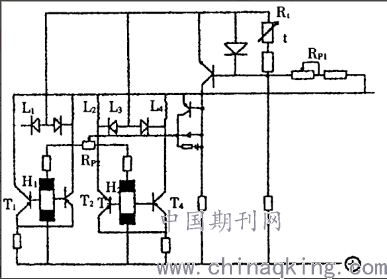
Сигнал, генерируемый элементом Холла, необходимо подать и усилить для возбуждения катушки статора. На рисунке 2 показана схема привода бесщеточного двигателя элемента Холла. Принцип работы: двухфазный коллекторный двигатель, соединенный двумя компонентами Холла Н, обмотки двигателя L\, Lq и Ls и I имеют фазу электрического тока А. Переключатель с углом 180° имеет фазовый элемент Холла 90° с электрическим угловым соотношением между H и H2. Элемент Холла на рисунке 2 имеет две функции: одна — определять положение ротора, а вторая — определять положение или напряжение отклонения скорости системы управления трансмиссией.
За счет вращения ротора с постоянными магнитами ток, управляемый переключателем на элементе Холла, последовательно создает вращающееся магнитное поле в обмотке статора. В это время ток, протекающий через обмотку, пропорционален току, протекающему через элемент Холла H.
Ток элемента Холла пропорционален крутящему моменту отклонения скорости двигателя. Поскольку ток пропорционален отклонению скорости, наведенное напряжение в обмотке двигателя L выпрямляется и сглаживается диодом D и сравнивается с опорным напряжением RP переменного потенциометра. Элемент Холла работает в режиме управления постоянным током, что упрощает переключение тока.
Базовая
формула схемы измерения элемента Холла: коэффициент чувствительности единицы KH;
B — интенсивность магнитной индукции
I, возбуждающей ток через элемент Холла,
из приведенного выше уравнения видно, что при температуре окружающей среды и ток возбуждения остается неизменным, потенциал Холла пропорционален напряженности магнитного поля. Следовательно, силу магнитного поля можно определить, определив выходное напряжение элемента Холла.
1.2 Элементы Холла используются для определения положения магнитного полюса бесщеточных двигателей.
В бесщеточных двигателях обычно используется сталь с постоянными магнитами, переменный или пульсирующий ток через обмотку статора. Этот метод позволяет отказаться от щеток и коммутаторов для создания вращающихся магнитных полей. Вращающееся магнитное поле угла крутящего момента между магнитным полюсом и стальным вращающимся полюсом постоянного магнита должно поддерживаться на уровне половины диапазона, чтобы можно было создать хороший крутящий момент.
Следовательно, элемент Холла можно использовать в качестве магнитного датчика для определения положения ротора, а сигнал использовать для возбуждения обмотки статора. На рисунке 1 показана схема определения положения магнитного полюса элемента Холла бесщеточного двигателя. Выходное напряжение элемента Холла H изменяется с изменением магнитного поля при вращении двигателя. Транзисторы Т и Т2 попеременно включаются и выключаются, выдавая на клеммы А и В два противоположных сигнала. Сопротивление электрода можно регулировать в зависимости от выходного напряжения, а элемент Холла H может быть 5F-MS-07f.
2 Схема привода бесщеточного двигателя с использованием элемента Холла
2.1 Усиление и управление индукционным сигналом элемента Холла
Сигнал, генерируемый элементом Холла, необходимо подать и усилить для возбуждения катушки статора. На рисунке 2 показана схема привода бесщеточного двигателя элемента Холла. Принцип работы: двухфазный коллекторный двигатель, соединенный двумя компонентами Холла Н, обмотки двигателя L\, Lq и Ls и I имеют фазу электрического тока А. Переключатель с углом 180° имеет фазовый элемент Холла 90° с электрическим угловым соотношением между H и H2. Элемент Холла на рисунке 2 имеет две функции: одна — определять положение ротора, а вторая — определять положение или напряжение отклонения скорости системы управления трансмиссией.
За счет вращения ротора с постоянными магнитами ток, управляемый переключателем на элементе Холла, последовательно создает вращающееся магнитное поле в обмотке статора. В это время ток, протекающий через обмотку, пропорционален току, протекающему через элемент Холла H.
Ток элемента Холла пропорционален крутящему моменту отклонения скорости двигателя. Поскольку ток пропорционален отклонению скорости, наведенное напряжение в обмотке двигателя L выпрямляется и сглаживается диодом D и сравнивается с опорным напряжением RP переменного потенциометра. Элемент Холла работает в режиме управления постоянным током, что упрощает переключение тока.
Рисунок 3.
Рисунок 2. Схема привода бесщеточного двигателя с использованием элементов Холла.
На рисунке 2 RP1 используется для регулирования скорости, RP2 используется для балансировки цепи, а термистор R1 используется для температурной компенсации. В зависимости от выбора и структуры T1, T2, T3 и T4 (например, структура Дарлингтона и т. д.) можно управлять двигателями соответствующей мощности.
2.2. Элемент Холла и бесщеточный двигатель постоянного тока образуют схему привода.
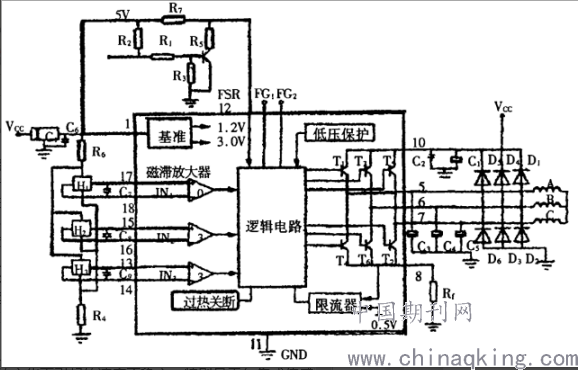
В этой статье представлена комбинация элемента Sanyo LB1690 и элемента Холла, используемая для управления приводом бесщеточного двигателя постоянного тока. Рабочий процесс показан на рисунке 3. Источник питания VCC выдает напряжение 5 В после стабилизации микросхемой IC1. Один канал фильтруется конденсатором C6 и передается на LB1690 в качестве рабочего источника питания, другой канал подает питание на Холл; элемент через резисторы R4 и R6 для разделения напряжения и ограничения тока. Учитывая фазовый угол тока двигателя, элементы Холла H1, H2 и H3 используются для определения положения ротора. Сигнал, обнаруженный элементом Холла, фильтруется конденсаторами С7, С8 и С9, а затем отправляется на гистерезисный усилитель. После обработки сигнала он отправляется на логический оператор. Наконец, выводятся 6 сигналов для управления проводимостью. силовые лампы T1~T6 с определенной логической связью включаются и выключаются. T1~T6 образуют трехфазный силовой мост для подачи питания на обмотку двигателя; D1~D6 — соответствующие цепи обратного обратного диода; A, B и C — трехфазные обмотки бесщеточного двигателя постоянного тока; 6 режимов подачи питания полностью симметричны, поэтому при стабильной работе общий электромеханический энергетический процесс бесщеточного двигателя постоянного тока составляет 1/6 основного цикла, который представляет собой повторяющийся цикл. C3, C4 и C5 представляют собой трехфазные выходные мощности. для фильтрации высших гармоник Конденсатор фильтра волны С1 и С2 — конденсаторы фильтра источника питания Rф — токоограничивающий резистор. сторона силового моста отключает выход, тем самым прекращая подачу питания на трехфазную обмотку двигателя. Он играет роль защиты силовой трубки R1, R2, R3, R5, R7 и триода, образующих работу двигателя; вентилятор и остановить цепь управления. Когда CON меньше 0,6 В, триод отключается, а потенциал вывода 12 LB1690 поднимается примерно до 2,5 В, в это время вентилятор перестает работать. Рисунок 3. LB1690 применяется для управления бесщеточным двигателем постоянного тока. Рисунок
3. Встроенный датчик Холла применяется для привода бесщеточного двигателя.
Встроенный датчик Холла использует технологию КМОП для интеграции элементов Холла, усилителей, триггеров Шмитта и выходных цепей на одном кристалле, то есть интегрированного в интегрированный Его преимуществом является высокая степень интеграции. Эта же функция интегрирована в очень маленький чип и используется для управления бесщеточным двигателем. Благодаря большому выходному сигналу и стабильной работе схема упрощается и улучшается.
3.1 Используйте UGN3235 для формирования схемы привода бесщеточного двигателя постоянного тока.
UGN3235 представляет собой встроенный чип переключателя Хоула. Это блок-схема схемы UGN3235. Он содержит генератор напряжения Хоуля, два триггера Шмитта, стабилизатор напряжения, два выходных транзистора, схему защиты от переполюсовки, схему стабилизации и схему защиты.
Схема привода бесщеточного двигателя постоянного тока состоит из UGN3235. Среди них L1 и L2 — обмотки двигателя, а C1 — развязывающий конденсатор. Два независимых выходных переключателя соответствуют полюсу N и полюсу S. Выходной сигнал ответа от 2 контактов представляет собой положительный поток от полюса S магнитного поля, а выходной сигнал ответа от 3 контактов представляет собой отрицательный поток от полюса N магнитного поля. После усиления через лампы Т1 и Т2 катушка двигателя приводится в действие.
3.2 Драйвер датчика Холла UDN3625M и UDN3626M
UDN3625M и UDN3626M — это монолитные ИС датчика/драйвера Холла и функциональные блок-схемы бесщеточных двигателей постоянного тока. Эти микросхемы обеспечивают монолитное управление и решения для прямого привода для многих небольших однофазных, униполярных бесщеточных двигателей постоянного тока с помощью всего лишь нескольких внешних устройств. . Содержит высокочувствительный датчик Холла, логику управления и преобразователя, стабильный регулятор, функции самозащиты и защиты системы, а также два сильноточных выхода насыщения NPN. Максимальный (по умолчанию) выходной ток нагрузки составляет 113 А или 600 мА для UDN3625M-UDN3626M. Независимый выход низкого уровня обеспечивает возможность измерения скорости для управления скоростью двигателя и обнаружения состояния опрокидывания. Устройство может управляться и приводиться в движение небольшим однофазным униполярным бесщеточным двигателем, требующим всего лишь нескольких внешних компонентов. При использовании соответствующей внешней логической схемы управление скоростью с помощью широтно-импульсной модуляции (ШИМ) может осуществляться на выводе регулировки выходного тока.
4. Заключение.
Поскольку в системах управления бесщеточными двигателями используются элементы Холла, индуцированное напряжение, генерируемое в статоре двигателя, в основном используется для преодоления нестабильности скорости, вызванной изменениями контактного сопротивления щетки, когда двигатель работает под индуцированным напряжением. В частности, интегрированные датчики Холла широко используются благодаря своим превосходным характеристикам и более низкой стоимости, чем датчики скорости, и их очень удобно использовать в технологиях управления двигателями.
Рисунок 2. Схема привода бесщеточного двигателя с использованием элементов Холла.
На рисунке 2 RP1 используется для регулирования скорости, RP2 используется для балансировки цепи, а термистор R1 используется для температурной компенсации. В зависимости от выбора и структуры T1, T2, T3 и T4 (например, структура Дарлингтона и т. д.) можно управлять двигателями соответствующей мощности.
2.2. Элемент Холла и бесщеточный двигатель постоянного тока образуют схему привода.
В этой статье представлена комбинация элемента Sanyo LB1690 и элемента Холла, используемая для управления приводом бесщеточного двигателя постоянного тока. Рабочий процесс показан на рисунке 3. Источник питания VCC выдает напряжение 5 В после стабилизации микросхемой IC1. Один канал фильтруется конденсатором C6 и передается на LB1690 в качестве рабочего источника питания, другой канал подает питание на Холл; элемент через резисторы R4 и R6 для разделения напряжения и ограничения тока. Учитывая фазовый угол тока двигателя, элементы Холла H1, H2 и H3 используются для определения положения ротора. Сигнал, обнаруженный элементом Холла, фильтруется конденсаторами С7, С8 и С9, а затем отправляется на гистерезисный усилитель. После обработки сигнала он отправляется на логический оператор. Наконец, выводятся 6 сигналов для управления проводимостью. силовые лампы T1~T6 с определенной логической связью включаются и выключаются. T1~T6 образуют трехфазный силовой мост для подачи питания на обмотку двигателя; D1~D6 — соответствующие цепи обратного обратного диода; A, B и C — трехфазные обмотки бесщеточного двигателя постоянного тока; 6 режимов подачи питания полностью симметричны, поэтому при стабильной работе общий электромеханический энергетический процесс бесщеточного двигателя постоянного тока составляет 1/6 основного цикла, который представляет собой повторяющийся цикл. C3, C4 и C5 представляют собой трехфазные выходные мощности. для фильтрации высших гармоник Конденсатор фильтра волны С1 и С2 — конденсаторы фильтра источника питания Rф — токоограничивающий резистор. сторона силового моста отключает выход, тем самым прекращая подачу питания на трехфазную обмотку двигателя. Он играет роль защиты силовой трубки R1, R2, R3, R5, R7 и триода, образующих работу двигателя; вентилятор и остановить цепь управления. Когда CON меньше 0,6 В, триод отключается, а потенциал вывода 12 LB1690 поднимается примерно до 2,5 В, в это время вентилятор перестает работать. Рисунок 3. LB1690 применяется для управления бесщеточным двигателем постоянного тока. Рисунок
3. Встроенный датчик Холла применяется для привода бесщеточного двигателя.
Встроенный датчик Холла использует технологию КМОП для интеграции элементов Холла, усилителей, триггеров Шмитта и выходных цепей на одном кристалле, то есть интегрированного в интегрированный Его преимуществом является высокая степень интеграции. Эта же функция интегрирована в очень маленький чип и используется для управления бесщеточным двигателем. Благодаря большому выходному сигналу и стабильной работе схема упрощается и улучшается.
3.1 Используйте UGN3235 для формирования схемы привода бесщеточного двигателя постоянного тока.
UGN3235 представляет собой встроенный чип переключателя Хоула. Это блок-схема схемы UGN3235. Он содержит генератор напряжения Хоуля, два триггера Шмитта, стабилизатор напряжения, два выходных транзистора, схему защиты от переполюсовки, схему стабилизации и схему защиты.
Схема привода бесщеточного двигателя постоянного тока состоит из UGN3235. Среди них L1 и L2 — обмотки двигателя, а C1 — развязывающий конденсатор. Два независимых выходных переключателя соответствуют полюсу N и полюсу S. Выходной сигнал ответа от 2 контактов представляет собой положительный поток от полюса S магнитного поля, а выходной сигнал ответа от 3 контактов представляет собой отрицательный поток от полюса N магнитного поля. После усиления через лампы Т1 и Т2 катушка двигателя приводится в действие.
3.2 Драйвер датчика Холла UDN3625M и UDN3626M
UDN3625M и UDN3626M — это монолитные ИС датчика/драйвера Холла и функциональные блок-схемы бесщеточных двигателей постоянного тока. Эти микросхемы обеспечивают монолитное управление и решения для прямого привода для многих небольших однофазных, униполярных бесщеточных двигателей постоянного тока с помощью всего лишь нескольких внешних устройств. . Содержит высокочувствительный датчик Холла, логику управления и преобразователя, стабильный регулятор, функции самозащиты и защиты системы, а также два сильноточных выхода насыщения NPN. Максимальный (по умолчанию) выходной ток нагрузки составляет 113 А или 600 мА для UDN3625M-UDN3626M. Независимый выход низкого уровня обеспечивает возможность измерения скорости для управления скоростью двигателя и обнаружения состояния опрокидывания. Устройство может управляться и приводиться в движение небольшим однофазным униполярным бесщеточным двигателем, требующим всего лишь нескольких внешних компонентов. При использовании соответствующей внешней логической схемы управление скоростью с помощью широтно-импульсной модуляции (ШИМ) может осуществляться на выводе регулировки выходного тока.
4. Заключение.
Поскольку в системах управления бесщеточными двигателями используются элементы Холла, индуцированное напряжение, генерируемое в статоре двигателя, в основном используется для преодоления нестабильности скорости, вызванной изменениями контактного сопротивления щетки, когда двигатель работает под индуцированным напряжением. В частности, интегрированные датчики Холла широко используются благодаря своим превосходным характеристикам и более низкой стоимости, чем датчики скорости, и их очень удобно использовать в технологиях управления двигателями.