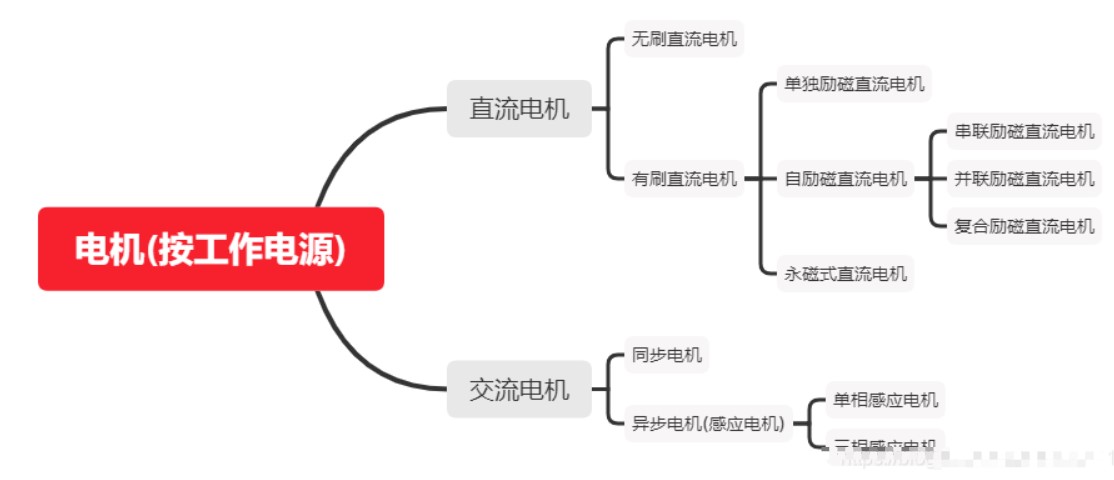
Классификация двигателей 1. Двигатель постоянного тока. Двигатель постоянного тока — это двигатель, приводимый в движение постоянным током, а двигатель переменного тока — это двигатель, приводимый в движение переменным током. С точки зрения производительности основное различие между постоянным и переменным током заключается в контроле скорости. Скорость двигателя постоянного тока пропорциональна напряжению, а скорость двигателя переменного тока пропорциональна частоте и количеству магнитных полюсов.
В сервосистемах можно использовать как постоянный, так и переменный ток, но двигатели переменного тока могут выдерживать более высокие токи, поэтому в промышленных применениях наиболее распространенными серводвигателями являются серводвигатели переменного тока. Так называемая серво система на самом деле не имеет ничего общего с типом и конструкцией двигателя. Пока существует обратная связь и формируется замкнутый контур управления, это серво система.
Датчики холла купить — https://alli.pub/7162aa?erid=2SDnjd5WJdp
Контроллер мотора 36В/48В 60В 500 Вт контроллер электровелосипеда — https://alli.pub/7162c1?erid=2SDnjcMzzE6
ООО «АЛИБАБА.КОМ (РУ)» ИНН 7703380158
Эта обратная связь может основываться на положении, скорости, крутящем моменте и т. д. Двигатель может быть любым типом двигателя, например, шаговыми двигателями, щеточными двигателями постоянного тока, бесщеточными двигателями постоянного тока, серводвигателями переменного тока, асинхронными двигателями, двигателями с прямым приводом и т. д. — все они могут использоваться в качестве серводвигателей при наличии обратной связи. конфигурация.
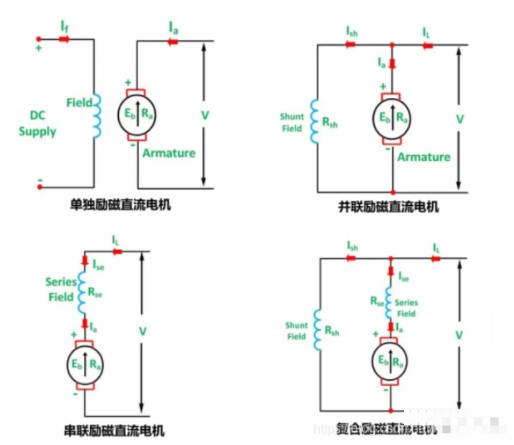
Конечно, если пойти еще дальше, двигатели постоянного тока можно разделить на коллекторные двигатели постоянного тока и бесщеточные двигатели постоянного тока. 1.1 Коллекторные двигатели постоянного тока По различным методам возбуждения коллекторные двигатели постоянного тока можно разделить на двигатели постоянного тока с индивидуальным возбуждением, двигатели постоянного тока с самовозбуждением и двигатели с постоянными магнитами.
Возбуждение — это когда на катушку статора подается напряжение, создающее магнитное поле, которое притягивает ротор. Двигатели постоянного тока с самовозбуждением по различным методам намотки можно разделить на двигатели последовательного возбуждения, двигатели шунтового возбуждения и двигатели смешанного возбуждения (последовательные и параллельные). Принципиальная схема работы коллекторного двигателя постоянного тока показана на рисунке ниже:
Щеточный двигатель постоянного тока (щеточный двигатель постоянного тока), статор изготовлен из постоянных магнитов или катушек, образующих фиксированное магнитное поле.
На одном конце статора имеются фиксированные угольные или медные щетки, которые отвечают за подачу внешнего тока в обмотку ротора.
Ротор состоит из катушек, катушки соединены с коллектором на конце вала. Внешний ток проходит через угольные щетки и коммутатор и достигает катушки ротора.
Когда на катушку подается напряжение, создается магнитное поле.
Это магнитное поле притягивается постоянным магнитом, заставляя ротор вращаться. После поворота на определенный угол катушка ротора меняет направление тока через механический коммутатор фаз. угольная щетка, тем самым изменяя направление магнитного поля и обеспечивая непрерывное вращение ротора.
В коллекторных двигателях используются механические коммутаторы фаз.
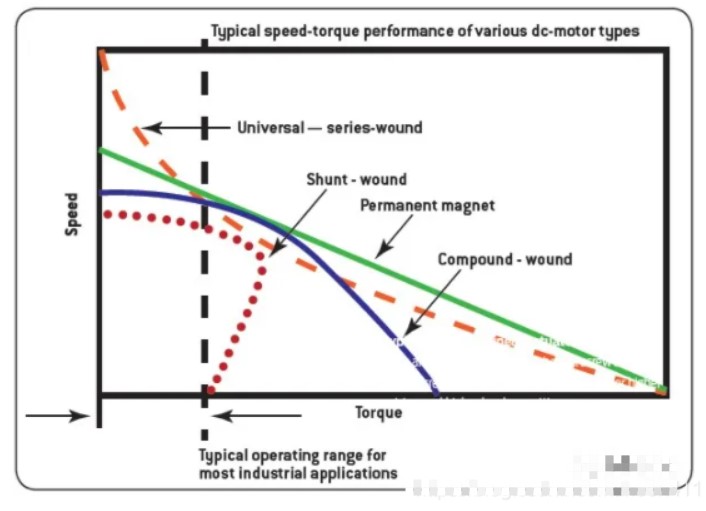
Их преимущества заключаются в простой конструкции, низкой цене и повышенном крутящем моменте. Недостатками являются то, что они легко изнашиваются и их нельзя использовать в чистых помещениях, а их срок службы ограничен и требует регулярного обслуживания.
1.2 Бесщеточный двигатель постоянного тока
Принципиальная схема работы бесщеточного двигателя постоянного тока показана на рисунке ниже. В большинстве бесщеточных двигателей постоянного тока (бесщеточный двигатель постоянного тока = BLDC) статор представляет собой набор катушек, а ротор — набор магнитов. Поэтому нет необходимости использовать щетки для подачи тока к статору. Это происхождение бесщеточных двигателей.
Принцип движения заключается в том, что магнитные поля притягивают друг друга или магнитные поля отталкивают друг друга. Основное различие между бесщеточным двигателем постоянного тока и коллекторным двигателем постоянного тока заключается в том, что величина и направление тока бесщеточного двигателя изменяются непосредственно через контроллер. Обычно статор имеет три комплекта обмоток, которые подключены к цепи управления. Схема управления определяет положение вращающегося вала через датчик Холла, чтобы определить, на какие фазы необходимо подать напряжение дальше.
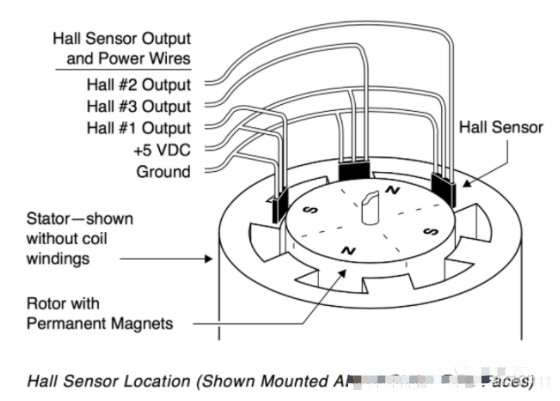
Система управления постоянно меняет фазу включения и изменяет величину тока для достижения различного управления крутящим моментом. Поскольку бесщеточные двигатели коммутируются электроникой, они более надежны, работают тише и более эффективны. Бесщеточные двигатели, как правило, можно сделать очень маленькими и иметь высокое соотношение крутящего момента к весу, но, конечно, стоимость увеличивается из-за необходимых датчиков и контроллеров. 1.2.1 Управление бесщеточным двигателем постоянного тока с помощью датчиков Холла На следующем рисунке представлена упрощенная структурная схема бесщеточного двигателя постоянного тока. На торцевой стороне расположены три датчика Холла (датчики Холла). Ротор вращается, образуя изменяющееся магнитное поле.
Датчик воспринимает это магнитное поле. Каждый раз каждый датчик может выводить 0 или 1, поэтому 3 датчика могут выдавать разные комбинации трехзначных чисел, например 110, 101 и т. д. Эти комбинации представляют разные положения ротора. Обратите внимание, что датчик Холла №3 находится между №1 и №2. Среди них ротор состоит из постоянных магнитов. Когда ротор вращается, срабатывают или отключаются три датчика Холла, определяющие положение ротора, а затем сообщающие информацию о положении контроллеру, чтобы решить, какие катушки находятся. под напряжением и какие из них следующие. Короче говоря, без электричества достигается электронная коммутация (Electrical Commutation).
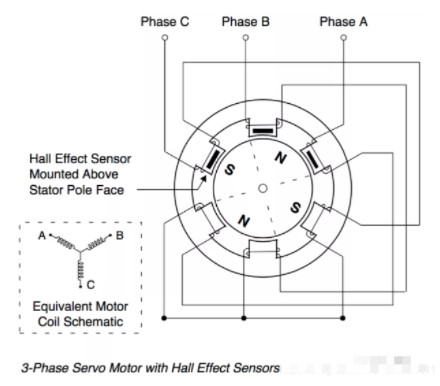
Следовательно, датчик Холла здесь играет роль в связи, а в коллекторных двигателях постоянного тока это достигается за счет взаимодействия физических угольных щеток и механических коммутаторов фаз. Итак, давайте уточним и посмотрим, как три датчика Холла определяют положение ротора, а затем сообщают двигателю о необходимости переключения и достижения непрерывного вращения. На рисунке ниже показан трехфазный серводвигатель с датчиком Холла. Как показано на рисунке выше, один магнитный полюс может одновременно охватывать два датчика Холла. На данный момент на рисунке Холл № 1 совмещен с южным полюсом, а Холл № 2 и Холл 3 совмещены с южным полюсом.
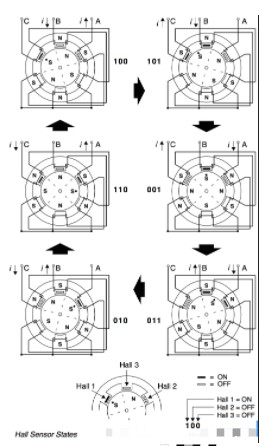
Если полюс S запускает Холл, полюс N гаснет, тогда состояние Холла на рисунке выше может представлять собой положение 100. Давайте рассмотрим ситуацию более подробно. Как показано на рисунке ниже, двигатель вращается по часовой стрелке, рядом с полюсом S на роторе имеется небольшая черная точка, указывающая направление вращения ротора. Драйвер одновременно подает питание на два набора катушек и обесточивает другой набор катушек. По соглашению, катушка, в которую течет ток, генерирует магнитное поле северного полюса N на статоре, а катушка, в которую течет ток, создает магнитное поле южного полюса S на статоре.
Теперь, если вы хотите добиться вращения по часовой стрелке, как использовать состояние Холла для переключения порядка и направления подачи питания на катушку? Например, если индукция Холла находится в состоянии 100, что показано на первом рисунке выше, то драйверу приказано в это время включить фазу AB, и ток течет из фазы B и вытекает из фазы A. Таким образом, группа катушек B образует полюс N, а группа катушек A образует полюс S. N-полюс катушки и противоположный N-полюс ротора отталкиваются и притягивают ближайший к нему S-полюс ротора. S-полюс катушки притягивает N-полюс ротора, добиваясь вращения по часовой стрелке.
Таким же образом мы можем сделать вывод, как катушка должна быть запитана в других состояниях Холла. В конечном итоге формируются шесть состояний Холла, показанные на рисунке выше, а также диаграмма последовательности того, из какой катушки катушка должна втекать и какая катушка должна вытекать в этом состоянии. Картинка выше немного сложна для понимания. Если временная последовательность Холла, а также последовательность и направление подачи питания на обмотку изображены на рисунке, это будет изображение ниже. Это будет легче понять.